
Capteurs – Analogiques – Numériques – TOR – Photoélectriques
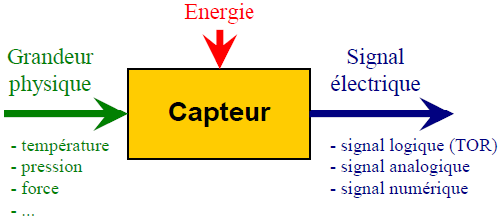
Un capteur est un dispositif transformant l’état d’une grandeur physique observée en une grandeur utilisable, telle qu’une tension électrique, une hauteur de mercure, une intensité ou la déviation d’une aiguille. Les capteurs sont les éléments de base des systèmes d’acquisition de données. Leur mise en œuvre est du domaine de l’instrumentation.
Le capteur est l’élément indispensable à la détection de ces grandeurs physiques.
Un capteur est un organe de prélèvement d’informations qui élabore à partir d’une grandeur physique, une autre grandeur physique de nature différente (souvent électrique).
Cette grandeur représentative de la grandeur prélevée est utilisable à des fins de mesure ou de commande.
I- Types de capteurs
On peut classer les capteurs en 3 groupes en fonction de la nature de l’information délivrée en sortie :
I-1. Les capteurs analogiques
Dans la pratique industrielle, on donne à ce type de matériel le nom de capteurs. Type de signal de sortie : 0 – 10V ou 4 – 20mA
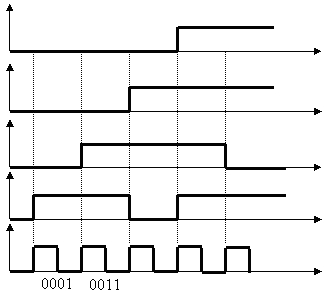
I-2. Les capteurs numériques
- Souvent nommés codeurs ou compteurs
- Type de signal de sortie : 0011 ou 0001
I-3. Les capteurs logiques ou Tout Ou Rien (TOR)
- Ils portent le nom de détecteurs.
- Type de signal de sortie 0V ou 5V
II- Les capteurs analogiques
La sortie est une grandeur physique dont la valeur est proportionnelle à la grandeur physique mesurée par le capteur.
La sortie peut prendre une infinité de valeurs continues. Le signal des capteurs analogiques peut être du type : sortie tension ou sortie courant.
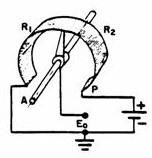
II-1 Les capteurs potentiométriques
Les capteurs potentiométriques servent à détecter une position ou un déplacement rectiligne ou angulaire.
La rotation de son axe est liée à la variation de la résistance comprise entre le curseur et l’une de butées par rapport à sa résistance totale : on peut transmettre à distance, un signal électrique de tension proportionnel à la position de l’axe.

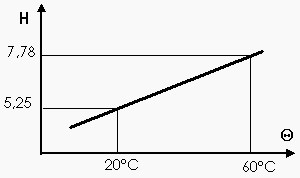
II-2 Exemple: Thermomètre
A chaque variation de température entre 20°C et 40°C correspond une nouvelle information informationnelle.
Ce type de capteur présente l’avantage de donner une fonction linéaire. Mais son utilisation n’est pas possible avec des systèmes numériques.
III- Les capteurs numériques
III-1. Les codeurs rotatifs
Le contrôle du déplacement, de la position et de la vitesse est un problème habituellement rencontré sur les systèmes automatisés.
Les systèmes de détection conventionnels, interrupteurs de position, détecteur inductif ou photoélectrique trouvent rapidement leurs limites dès lors que le nombre de positions à contrôler devient trop important.
Les codeurs rotatifs permettent au système de traitement de maîtriser le positionnement d’un mobile avec une grande précision et sans répartir sur le système technique un grand nombre de détecteurs de position.
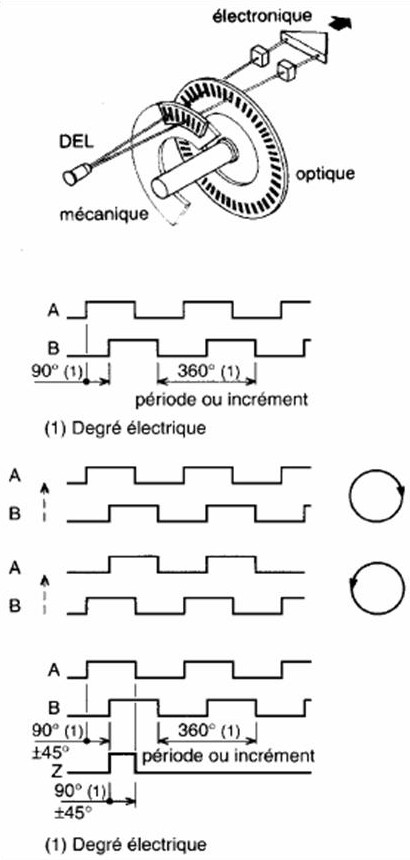
Un codeur optique est un capteur angulaire de position, lié mécaniquement à un arbre qui l’entraîne, son axe fait tourner un disque qui comporte une succession de zones opaques et transparentes. La lumière émise par des diodes électroluminescentes arrive sur des photodiodes chaque fois qu’elle traverse les zones transparentes du disque. Les photodiodes génèrent alors un signal électrique
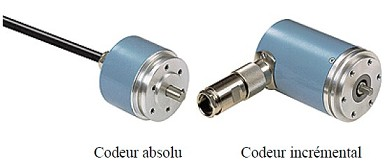
III-2. Le codeur incrémental
Le codeur incrémental ou relatif est également appelé générateur d’impulsions.
Une ou deux pistes extérieures divisées en N intervalles d’angles égaux alternativement opaques et transparents.
Pour un tour complet de l’axe codeur, le faisceau lumineux est interrompu N fois et délivre N signaux carrés A et B en quadrature.
Le nombre de points par tour du capteur se nomme la résolution.
Le déphasage de 90° électrique des signaux A et B permet de déterminer le sens de rotation :
- Dans un sens pendant le front montant du signal (A), le signal (B) est à zéro.
- Dans l’autre sens pendant le front montant du signal (A), le signal (B) est à un.
- La piste intérieure (Z = top zéro) comporte une seule fenêtre transparente et délivre un seul signal par tour.
- Ce signal (Z) d’une durée 90° électrique détermine une position de référence et permet la réinitialisation à chaque tour.
- Le comptage décomptage des impulsions par l’unité de traitement permet de définir la position du mobile.
III-3. Le codeur incrémental
Ce concept a été développé pour pallier les contraintes développées ci-dessous et générées par le codeur incrémental (appelé aussi relatif) :
- En cas d’absence prolongée du réseau (en cas d’absence de sauvegarde côté unité de traitement) l’information de position peut être perdue.
- En cas d’une modification de position (déplacement manuel hors tension du mobile contrôlé en position), il y a perte de la position du mobile.
- En cas d’impossibilité de recalage par le “Top zéro” dans le cas de mouvement de type oscillant ne décrivant jamais un tour complet.
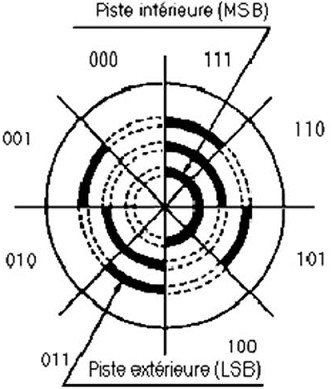
- Le disque rotatif du codeur absolu comporte un nombre (n) de pistes.
- Chaque piste a son propre système de lecture (diode émettrice et diode réceptrice).
- A chaque position angulaire de l’axe codeur correspond un code binaire.
IV- Les capteurs TOR
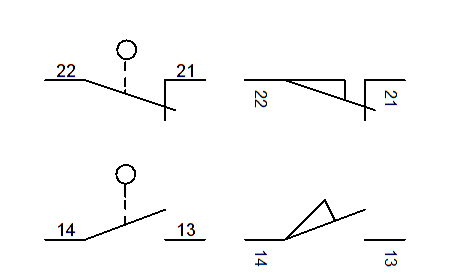
IV-1. Les capteurs mécaniques ou interrupteurs de position
Les capteurs mécaniques ou interrupteurs de position sont en contact direct avec la pièce en mouvement qu’il faut détecter.
L’action mécanique sur la partie mobile du capteur permet d’établir ou d’interrompre un contact électrique.
Ils transmettent au système de traitement les informations de présence, d’absence, de passage, de positionnement ou de fin de course.

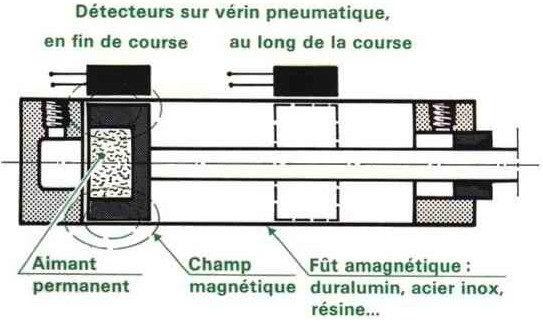
IV-2. Les capteurs de proximité ILS
Le capteur de proximité ILS permet de détecter tout objet magnétique qui se trouve à proximité de la tête de détection.
Un détecteur magnétique se compose essentiellement de 2 lames conductrices.
Le passage d’un matériau aimanté entraîne la déformation de ces lames, celles-ci entrent en contact et permettent le passage du courant.
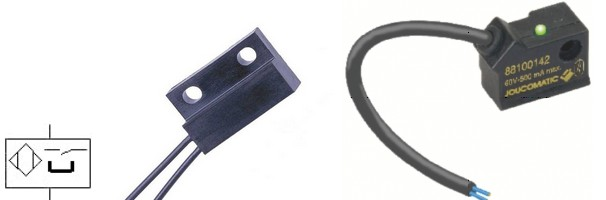
On les place généralement sur les corps des vérins pour acquérir la position du piston.
IV-3. Les capteurs de proximité inductifs
Les capteurs de proximité inductifs permettent de détecter tout objet métallique qui se trouve à proximité de la tête de détection.
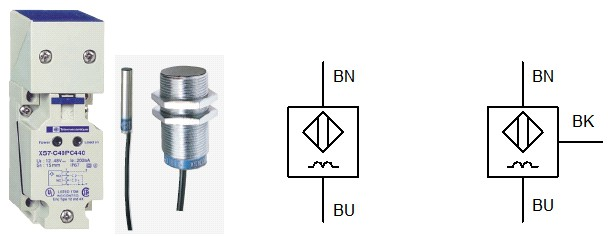
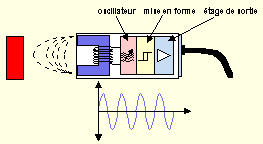
Un capteur inductif se compose essentiellement d’un oscillateur.
Le champ électromagnétique est crée à l’avant de la face sensible.
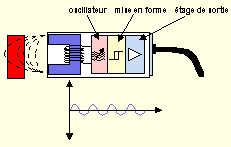
Toute pièce métallique pénétrant dans ce champ devient le siège de courants de Foucault qui provoquent l’arrêt des oscillations.
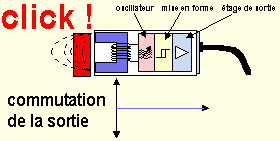
C’est donc l’arrêt des oscillations qui est détecté.
- champ magnétique
- bobinages
- oscillateur
- traitement du signal
- amplification du signal
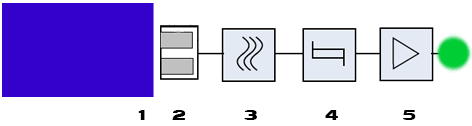
Il comporte un oscillateur (3) dont les bobinages constituent sa face sensible et un étage de sortie.
L’oscillateur crée en avant de la face sensible un champ électromagnétique alternatif ayant une fréquence de 100 à 600 kHz selon le modèle.
Lorsqu’un objet conducteur pénètre dans ce champ, il est le siège de courants induits circulaires qui se développent à sa périphérie.
Ces courants constituent une surcharge pour le système oscillateur et entraînent de ce fait une réduction d’amplitude des oscillations au fur et à mesure de l’approche de l’objet, jusqu’au blocage complet.
La détection de l’objet est effective lorsque la réduction de l’amplitude des oscillations est suffisante pour provoquer un changement d’état de la sortie du détecteur.
IV-4. Les capteurs de proximité capacitifs
Les capteurs de proximité capacitifs permettent de détecter tout objet qui se trouve à proximité de la tête de détection.
Un capteur capacitif se compose essentiellement d’un oscillateur dont le condensateur constitue la face sensible.
Lorsqu’un matériau conducteur ou isolant de permittivité supérieure à 1 est placé dans ce champ, il modifie la capacité et provoque l’arrêt des oscillations.
Comme pour le capteur inductif, c’est l’arrêt des oscillations qui est détecté.
L’avantage par rapport au capteur inductif c’est qu’il peut détecter à courte distance la présence de tous types d’objets.
IV-5. Mise en œuvre des capteurs de proximité
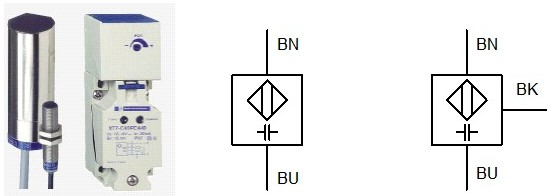
Pour la mise en œuvre des capteurs de proximité, on utilise couramment des capteurs en technique « 2 fils » ou « 3 fils ». Ils en existent cependant en « 4 et 5 fils ».
IV-5-1. Technique 2 fils :
Ce type de détecteur comporte un circuit électronique qui commande une sortie statique. Il se branche comme un interrupteur, en série avec le circuit à contrôler.
Il faut néanmoins vérifier la tension admissible et pour certains détecteurs, la polarité.
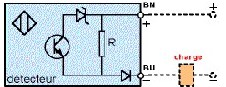
Charge alimenté en courant continu
Charge alimenté en courant alternatif
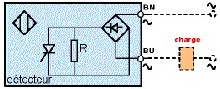
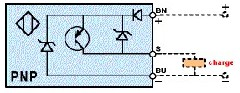
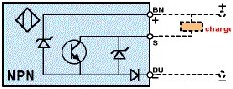
IV-5-2. Technique 3 fils :
Ce type de détecteur comporte un circuit électronique qui commande une ou plusieurs sorties statiques.
S’il ne comporte qu’une seule sortie statique, c’est un détecteur 3 fils sinon c’est un 4 fils (2 sorties statiques).
Il fonctionne uniquement en tension continue et peut être détecteur de type PNP ou NPN.
V- Les capteurs photoélectriques
Un détecteur photoélectrique réalise la détection d’une cible, qui peut être un objet ou une personne, au moyen d’un faisceau lumineux.
Les détecteurs photoélectriques se composent essentiellement d’un émetteur de lumière associé à un récepteur photosensible.
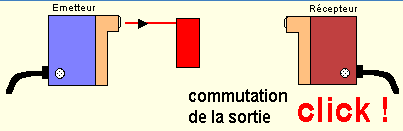
La détection est effective quand l’objet pénètre dans le faisceau lumineux et modifie suffisamment la quantité de lumière reçue par le récepteur pour provoquer un changement d’état de la sortie.
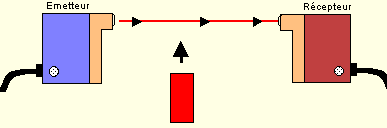
V-1. Système barrage
Caractéristiques du système barrage :
- 2 boîtiers
- Portée : 30m
- Ne détecte pas les objets transparents
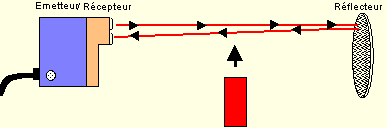
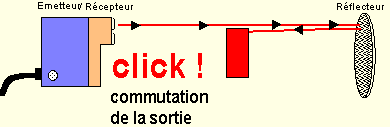
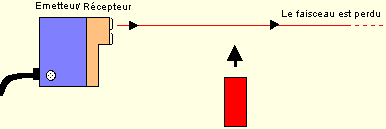
V-2. Système reflex
Caractéristiques du système reflex :
- 1 boîtier
- Portée : 15m
- Ne détecte pas les objets transparents et réfléchissants
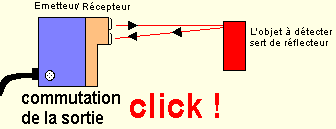
V-3. Système proximité
Caractéristiques du système de proximité :
- 1 boîtier
- Portée : dépend de la couleur de l’objet (clair mieux détecté)
- Pas les objets transparents
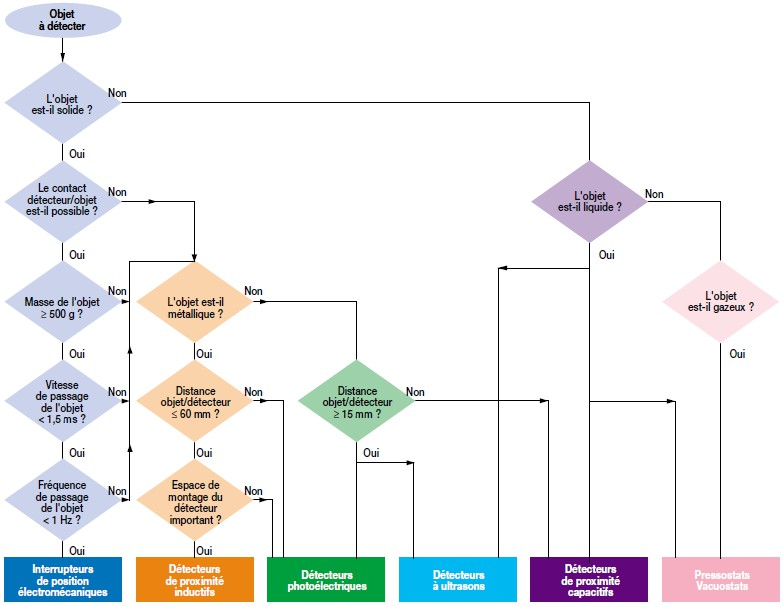
VI- Choix d’un capteur
Il existe différentes familles de détecteurs de présence ; le choix se déroule en deux temps.
Le logigramme ci-dessous illustre cette démarche qui conduit à sélectionner une famille de détecteurs sur la base de critères simples.
1. Phase n° 1 : elle consiste à déterminer la famille de détecteurs la mieux adaptée à l’application en répondant aux questions suivantes :
- nature de l’objet à détecter : solide, liquide, gazeux, métallique ou non,
- contact possible avec l’objet,
- distance objet/détecteur, masse de l’objet,
- vitesse de défilement,
- cadences de manœuvres,
- espace d’intégration du détecteur dans la machine.
2. Phase n° 2 : elle vise à déterminer le type et la référence du détecteur recherché. Cette deuxième phase tient compte :
- de l’environnement : température, humidité, poussières, projections diverses, etc,
- de la source d’alimentation : alternative ou continue,
- du signal de sortie : électromécanique, statique,
- du type de raccordement : câble, bornier, connecteur
Liens de téléchargement des cours sur les capteurs
Cours sur les capteurs N°1
Cours sur les capteurs N°2
Cours sur les capteurs N°3
Cours sur les capteurs N°4
Cours sur les capteurs N°5
Cours sur les capteurs N°6
merci infiniment
Merci Beaucoup pour ces cours très complet.
bien vue
Super